人間と機械の相乗効果。
昨年、アジア最大級の最先端IT・エレクトロニクス総合展のCEATECで、注目を集めていたオムロンの「卓球ロボット」。ご存じですか? 上の動画に出ているものは、今年バージョンアップしたその卓球ロボットです。
いわゆる人間型のロボットではありませんが、かなりインパクトのあるデザイン。そして、淡々と卓球をしている姿がユーモラスに映ります。
この卓球ロボット、CEATECの会場で大人気となり、数多くの人がプレイしていました。
そうだ、京都に行こう!
この卓球ロボットを体験できるということで、京都にあるオムロンのイノベーションセンタに行くことになった編集部。そこで、まずはどのくらいの卓球の腕前なのか、事前にプレイしてみました。

11対5とか、11対2というスコアで負け続ける編集部の鈴木くん。決してお上手ではありませんね。はっきり言いましょう、下手くそです!
そんな鈴木くん、京都にあるオムロンのイノベーションセンタを訪問。念願の卓球ロボットとご対面です。
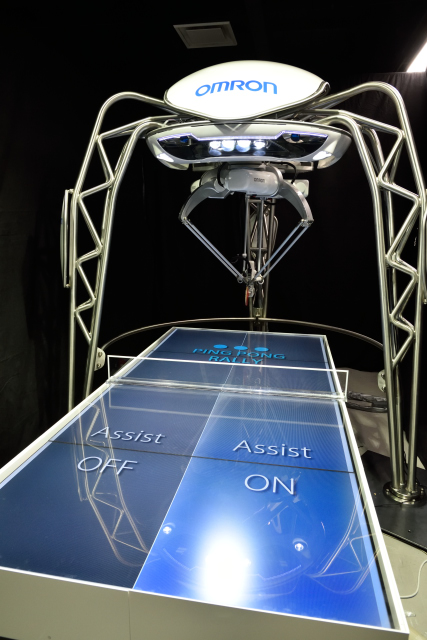
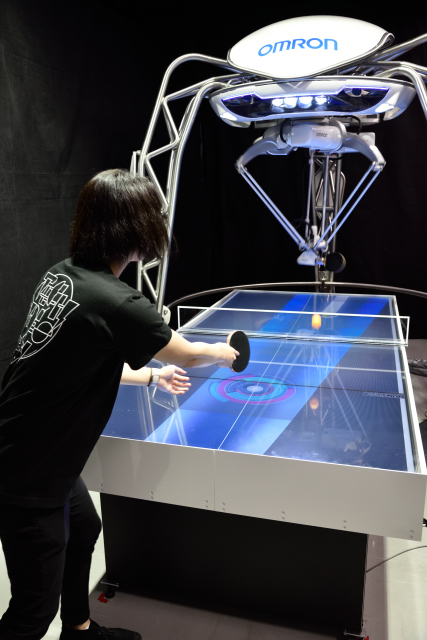
これがその卓球ロボット。卓球台が液晶ディスプレイになっており、ロボットが打つボールの着地点をあらかじめ教えてくれます。これならできる! 鈴木くんは卓球ロボット相手に特訓を重ねました。
そして数日後……。
再度、鈴木くんと卓球をプレイしてみました。

これまでは、2回くらいしか続かなかったラリーが、10回、20回と続くようになりました。ときには、僕を左右に振り翻弄することも。鈴木くんは、確実に卓球の腕を上げていました。
11対8、11対9。そして第3セットは9対11! 第4セットに11対8で試合には僕が勝ちましたが、とうとう鈴木くんにワンセット取られてしまいました。これほど短期間で卓球の腕前が上がるとは。
どうやらオムロンの卓球ロボットは、人間の能力を引き上げることができる力を持っているようです。わかりやすく言えば「卓球養成ギブス」のような感じでしょうか。恐るべし、卓球ロボット。
「協働」を目指したロボット、今年は「融和」へ
鈴木くんの卓球レベルを引き上げた卓球ロボット。単純に卓球のラリーの相手をしてくれるというだけではなく、人の卓球のスキルをアップさせる、いわゆる「人間の能力を引き出す」ことができるのが特長といえます。
そこで、この卓球ロボットの開発に携わっているオムロンの技術・知財本部、企画・CTO支援室主査の生雲公啓さんに、卓球ロボットに搭載されているテクノロジーについて、そしてそのテクノロジーが実社会でどのように使われていくのか、未来予想図をお聞きしました。

オムロン株式会社 技術・知財本部 企画・CTO支援室 生雲公啓さん
ギズモード編集部(以下ギズ):まず、卓球ロボットを開発しようとした経緯を教えてください。
生雲公啓さん(以下生雲さん):はじめはCEATECのために展示しようと思って作ったのではないんです。もともとは、社内の展示会向けに、技術・知財本部が「未来のテクノロジー」をテーマにいくつか出品しようということになったのがはじまりで。「自律分散」「進化する機械」、そして「人と機械の協調」という3つのテーマでそれぞれ進めることになり、「人と機械の協調」を担当するチームが考えたのが最初です。その展示会が中国で開催されるので、中国といえば卓球だ!という感じでした。
ギズ:今回のコンセプトは何でしょう。
生雲さん:これまでの人と機械の関係性は、人がやっていたことを機械が代替するという感じでした。しかし、我々は人と機械が一緒に何かを行うという対等な関係性を考えています。それを「協働」と呼んでいます。
昨年はこの辺りまでは実現していたのですが、今年はさらに「人と機械の融和」というコンセプトを掲げまして。「融和」という言葉には、機械が人の能力を引き出したり、人のモチベーションを上げたりする存在になればいいなという希望が込められています。
人の能力を成長させることが「人と機械の融和」につながる
ギズ:人と機械が卓球のラリーをするだけでは「協働」止まりだと思いますが、人の力を引き出すという「融和」という部分は、どのようなところですか?
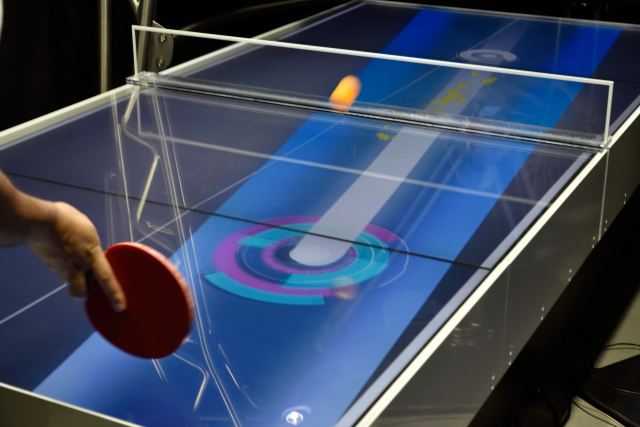
生雲さん:昨年と大きく変わっているところは、情報の提示部分です。今回はディスプレイを4つ並べて卓球台を製作しました。この卓球台は卓球ロボットと接続されていて、卓球ロボットが考えていることを表示できます。具体的には、ボールの落下地点を表示するようになっています。
プレーヤーから見ると、卓球ロボットがボールを打った瞬間にどこにボールが返ってくるのかがわかります。それがあると、今まで左右に振られたときに打てなかったボールが、打てるようになってくるんです。右から打ち返して左に返されたとしても、あらかじめわかっていれば対応できる。野球でいえば、バッターが次のボールがストレートかカーブかわかれば打ちやすくなるということと一緒だと思います。
打ち返してくる場所がわかれば、それに対応するための身体の動かし方などが身につくと思うんです。なので、繰り返していけば卓球がうまくなる。人の能力を成長させることができるのではと。そこが「人と機械の融和」につながっています。
2台のカメラと5軸コントローラーで卓球のラリーを再現
ギズ:卓球ロボットは、具体的にはどういう仕組みで動いているのでしょうか。

生雲さん:ボールの位置情報を取得する、いわゆるセンシングに関しては2台のカメラで行っています。人間の目と同じですね。これにより、現在のボールの位置情報はもちろん、ちょっと前のボールの位置情報も取得できるので、これを分析して、次のボールの位置を予測します。これを繰り返していくと、卓球ロボットがボールを打ってどこに落下して、人が打ち返したらどこに返ってくるのかという予測の確度が高まってくるので、その瞬間に卓球台のディスプレイ上にボールの落下位置が表示されます。
ギズ:どのくらいのスピードで計算をしているのでしょうか。
生雲さん:カメラのフレームレートと同じ、1秒間に約80回計算しています。たとえば、ネットに当たってボールの軌道が変わると、その場で計算しなおしてなるべくそこにラケットを移動して打ち返すように卓球ロボットは動きます。常にフィードバックをかけながら、コントロール側に情報を展開しているんです。これを制御の領域ではビジュアルフィードバックと呼んでいます。
ギズ:卓球ロボットの本体は、ゼロから作られているのですか?
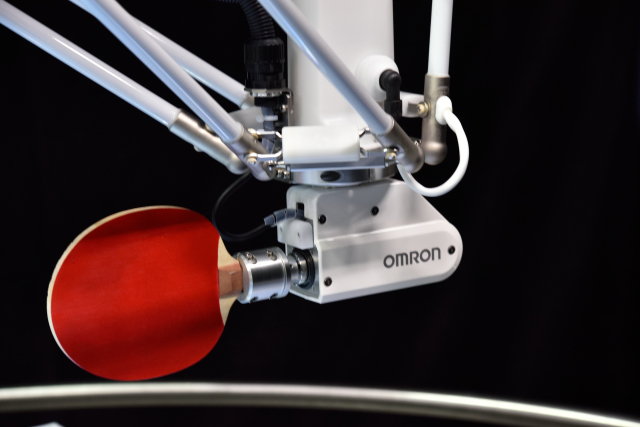
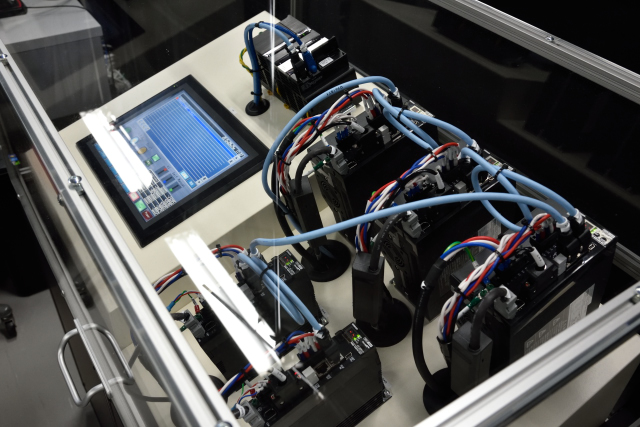
生雲さん:これは弊社の製品でもある「デルタロボット」を使用しています。普段は食品の工場での箱詰めなどに使われているロボットですが、これにラケットを付けています。制御機器は弊社のものを使い、腕は3軸、ラケット2軸、合計5軸を制御できるコントローラーで動かしています。
ギズ:この卓球ロボットのために新しく開発したというよりは、オムロンさんがもともと持っている製品と技術で、こういうことができますよという感じなんですね。

生雲さん:制御するソフトウェアはオリジナルですね。実はそこもいろいろ工夫しています。ボールの動きの予測という話では、重力や空気抵抗などを全部パラメータに組み込んで計算すれば正確性は増すと思います。しかし、卓球のラリーのように1秒とか数ミリ秒といった高速の世界では、そんな計算をすべてやっていると間に合わない。そこで、いかにそのような概念を入れつつも、簡単に処理できるようにするか。言い換えれば、いかに簡略化して実世界を再現するかというのが難しいところですね。
オムロンが思い描く未来予想図は?
ギズ:オムロンさんは、産業用ロボットやヘルスケア、モビリティやセーフティといった幅広い分野の技術を持っています。今後、それらの技術がどのように使われていくのか、未来予想図はどのような感じでしょうか。

生雲さん:企業理念として「我々の働きで我々の生活を向上し、よりよい社会を作りましょう」というのがありまして、これがすべての行動の原理です。今後、世の中の社会課題にどう貢献できるかというのが、社内でテーマを立案する際に問われ続けています。
製造現場を例にすると、労働者人口が減っていくなかで、いずれ人とロボットが共存して働くという未来が来るかもしれません。そのとき、人がやっていたことをロボットでやろうとしたら、人の目と同じセンシング技術が必要であったり、気配を感じて避けるといった動作をどうしたらいいのかといった課題が出てくるはずです。
自動車の分野でも、いずれ自律制御されたロボットのような自動車が出てくると思いますが、オムロンは、ロボットの眼となるさまざまなセンサーを持っています。自動車の周囲を監視するセンサーや、車内のドライバーの状態を見守るセンサーにも力を入れています。自動車側だけでなく、道路側の交通監視センサーの技術も保有しているのがオムロンの特徴ですね。自動車と道路の両面から事故や渋滞を予防して安全で安心なクルマ社会の実現に貢献していけるのではないかと考えています。
また、今回卓球ロボットでやっているような、ものの形や動きを賢く予測するアルゴリズムが応用できれば、オムロンの強みであるセンシング&コントロール+Think技術で、クルマ社会の発展にも役に立つのではないかと思っています。

ギズ:将来的にはセンシングとコントロールという2つの技術が重要になってくると思われているわけですね。
生雲さん:我々はそこを重要視しています。ビッグデータを集めて分析し新しいものを提示するといった世界もあります。しかし、ビッグデータもセンシングして情報を集めないといけません。ビッグデータを扱っている企業などはその部分があまり強くないところも多いため、オムロンと組みたいとお声がけいただくこともあります。
我々はそういう意味では小回りのきく、欲しい情報を得られる技術を持っているというところ、それをうまくコントロールできるところが強みだと思っています。
オムロンのオフィシャルムービー
CEATECのオムロンブースで卓球ロボットを体験
オムロンと言えば、僕たちにとっては体温計や血圧計、電動歯ブラシなどのヘルスケア製品のイメージが強いと思います。僕なんかは、20年くらい前に使っていたアナログモデムがオムロン製だったことから、通信機器も取り扱う会社なんだなと思っていました。
しかし、実は日本初の自動改札機を開発したのがオムロン。また、飛行機搭乗時のICリーダーなども手がけています。そのほか、交通システム関連、キーレスエントリーやパワーウィンドウといった自動車関連、産業用ロボット、アミューズメント関連など、あらゆる分野の製品を開発・販売している企業なのです。
そして、よりよい社会を実現するための「センシング&コントロール+Think」というコア技術を、わかりやすい卓球ロボットという形で提示できる柔軟な発想力があるのも素晴らしい。

CEATEC 2015は、10月7日(水)から10月10日(土)まで、幕張メッセで開催されます。オムロンのブースでは、卓球ロボットを始めオムロンのさまざまな技術を体験可能です。卓球ロボットで遊んでみたい、オムロンの未来を創る新しい技術を体感したい。そう思ったら、ぜひともCEATECに足を運んでみてはどうでしょうか。
source: オムロン(CEATEC JAPAN 2015)
(三浦一紀)